1 はじめに
本コラムでは、設例に基づき、AI関連発明の特許出願時の留意点を検討します。
2 設例(※1)(以下の特許出願は、特許となるでしょうか。)
スタートアップA社は、ドライバを用いてネジを自動的に締め付ける自動ネジ締付作業を行うに際し、ネジ締付品質を評価するネジ締付品質推定装置を発明しました。A社は、以下の出願書類において、特許出願をしました。
(1) 特許明細書等の出願書類
|
【発明の名称】ネジ締付品質推定装置 【特許請求の範囲】
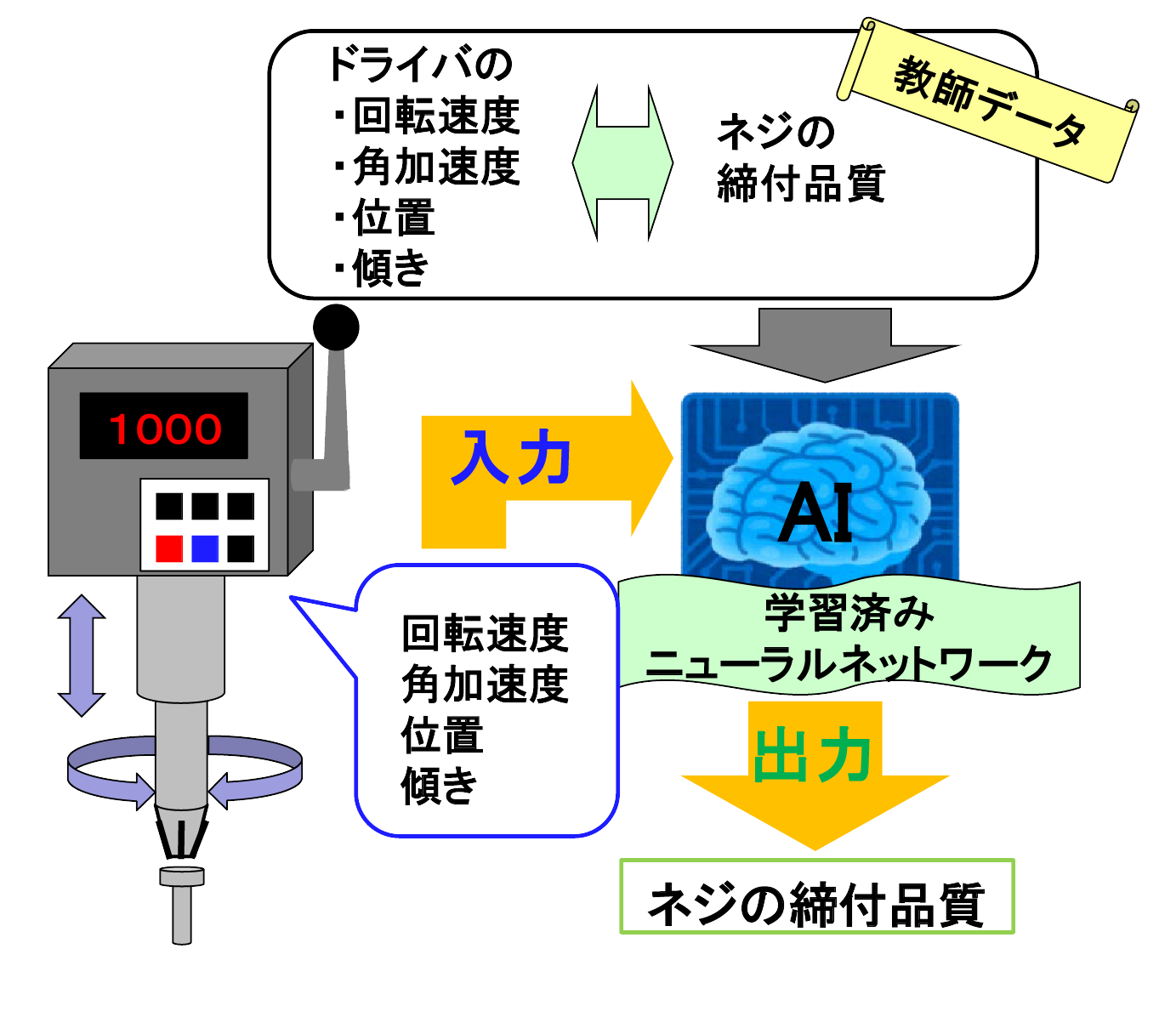
【請求項1】 ドライバにより自動ネジ締付作業が行われたときのネジ締付品質を評価するネジ締付品質推定装置において、
前記ドライバの回転速度、角加速度、位置及び傾きから構成される状態変数セットを測定する状態測定部と、 前記状態測定部により測定された前記状態変数セットと、当該状態変数セットで自動ネジ締付作業が行われたときの前記ネジの締付品質とを関連付けてニューラルネットワークを機械学習させる機械学習部と、 ドライバにより自動ネジ締付作業が行われたときに測定された状態変数セットを、前記機械学習部によって学習させた前記ニューラルネットワークに入力すると、ネジ締付品質を推定するネジ締付品質推定部と、 を具備するネジ締付品質推定装置。 |
(2) 技術水準(引用発明、周知技術等)
|
【引用発明1】(引用文献1に記載された発明:)
ドライバにより自動ネジ締付作業が行われたときのネジ締付品質を評価するネジ締付品質推定装置において、 前記ドライバの回転速度及び角加速度から構成される状態変数セットを測定する状態測定部と、 前記状態測定部により測定された前記状態変数セットと、当該状態変数セットで自動ネジ締付作業が行われたときの前記ネジの締付品質とを関連付けてニューラルネットワークを機械学習させる機械学習部と、 ドライバにより自動ネジ締付作業が行われたときに測定された状態変数セットを、前記機械学習部によって学習させた前記ニューラルネットワークに入力すると、ネジ締付品質を推定するネジ締付品質推定部と、 を具備するネジ締付品質推定装置。 【引用発明2】(引用文献2に記載された発明:)
ネジの締付品質の評価方法において、ドライバの位置及び傾きを測定し、前記測定された前記ドライバの位置及び傾きに基づき、ネジの締付品質を評価するネジの締付品質の評価方法。 【技術常識】
機械学習装置の技術分野において、機械学習装置の出力の信頼性や精度を高めるために、出力と相関関係を有する可能性が高い各種変数を、機械学習装置の入力として採用することは技術常識である。
|
(3) 特許出願の帰趨 (※2)
上記内容を出願した場合、特許されません。
請求項1にかかる発明と、引用発明1を対比した場合、請求項1にかかる発明は、状態測定部が、ドライバの回転速度、角加速度、位置及び傾きの、4つの状態変数から構成される状態変数セットを測定し、同セットを用いてニューラルネットワークの機械学習とネジ締付品質の推定を行うのに対し、引用発明1では、状態測定部が、ドライバの回転速度及び角加速度の、2つの状態変数から構成される状態変数セットを測定し、同セットを用いて、ニューラルネットワークの機械学習及びネジ締付品質の推定を行う点が相違します。
同相違点については、引用発明2において、ドライバの位置及び傾きに基づき、ネジの締付品質を評価するものが開示されているところ、周知技術として、機械学習装置の技術分野において、機械学習装置の出力の信頼性や精度を高めるために、出力と相関関係を有する可能性が高い各種変数を、機械学習装置の入力として採用することが知られているのであって、引用発明1に、出力の信頼性や精度を高めるために、引用発明2のドライバの位置及び向きというパラメータをも採用して、機械学習及びネジ締付品質の推定を行うことは、当業者が容易に想到できたとして、進歩性違反(特許法29条2項1号)として特許されません。
請求項1にかかる発明と、引用発明1を対比した場合、請求項1にかかる発明は、状態測定部が、ドライバの回転速度、角加速度、位置及び傾きの、4つの状態変数から構成される状態変数セットを測定し、同セットを用いてニューラルネットワークの機械学習とネジ締付品質の推定を行うのに対し、引用発明1では、状態測定部が、ドライバの回転速度及び角加速度の、2つの状態変数から構成される状態変数セットを測定し、同セットを用いて、ニューラルネットワークの機械学習及びネジ締付品質の推定を行う点が相違します。
同相違点については、引用発明2において、ドライバの位置及び傾きに基づき、ネジの締付品質を評価するものが開示されているところ、周知技術として、機械学習装置の技術分野において、機械学習装置の出力の信頼性や精度を高めるために、出力と相関関係を有する可能性が高い各種変数を、機械学習装置の入力として採用することが知られているのであって、引用発明1に、出力の信頼性や精度を高めるために、引用発明2のドライバの位置及び向きというパラメータをも採用して、機械学習及びネジ締付品質の推定を行うことは、当業者が容易に想到できたとして、進歩性違反(特許法29条2項1号)として特許されません。
3 本事例から学ぶ留意点
機械学習装置の技術分野において、機械学習装置の出力の信頼性や精度を高めるために、出力と相関関係を有する可能性が高い各種変数を、機械学習装置の入力として採用することは通常、技術常識であるので、既に、機械学習がなされている技術分野において(本件では、ネジの締付の品質評価)、機械学習に用いるパラメータが新規なだけでは(本件では、ドライバの位置及び傾き)、特許されないことに留意すべきです。
このような発明の場合、新規なパラメータによる機械学習が、(特定のパラメータとの組み合わせ等により)従来にはない品質評価特性を示す傾向などに着目することで、特許となる可能性があるので、出願前の時点であれば、このような視点で発明発掘を行い、発明をブラッシュアップしてから出願を行うことが有益でしょう。
このような発明の場合、新規なパラメータによる機械学習が、(特定のパラメータとの組み合わせ等により)従来にはない品質評価特性を示す傾向などに着目することで、特許となる可能性があるので、出願前の時点であれば、このような視点で発明発掘を行い、発明をブラッシュアップしてから出願を行うことが有益でしょう。
<注釈>
(※1) 本コラムで紹介するのは、「AI関連技術に関する事例について」(2019年・特許庁)の事例35です。本文中枠内は、「AI関連技術に関する事例について」(2019年・特許庁)30~31頁から引用、図表は「AI関連技術に関する事例の追加について」(2019年1月30日・特許庁審査第一部調整課審査基準室)33頁から引用。
(※2) 特許出願の帰趨の詳細は、「AI関連技術に関する事例について」(2019年・特許庁)31~32頁参照。
以上
※「THE INDEPENDENTS」2024年4月号 P.11より
※掲載時点での情報です
※掲載時点での情報です
 |
弁護士法人 内田・鮫島法律事務所 弁護士/弁理士 高橋 正憲 氏 2004年北海道大学大学院工学研究科量子物理工学専攻修了後、(株)日立製作所入社、知的財産権本部配属。2007年弁理士試験合格。2012年北海道大学法科大学院修了。2013年司法試験合格。2015年1月より現職。【弁護士法人 内田・鮫島法律事務所】 所在地:東京都港区虎ノ門2-10-1 虎ノ門ツインビルディング東館16階 TEL:03-5561-8550(代表) 構成人員:弁護士25名・スタッフ13名 取扱法律分野:知財・技術を中心とする法律事務(契約・訴訟)/破産申立、企業再生などの企業法務/瑕疵担保責任、製造物責任、会社法、労務など、製造業に生起する一般法律業務 http://www.uslf.jp/ |
